注冊賬號 | 忘記密碼
“智能移動機器人(中山)研究院” (如下簡稱中山研究院)由中山市科學技術局與中國北方車輛研究所于2019年3月合作成立并運行。主要以創(chuàng)新驅動、打造智能移動機器人國際平臺為戰(zhàn)略部署,以升級國家智能移動機器人核心技術、自主創(chuàng)新為驅動,建設集研發(fā)和社會科技服務為一體的科技創(chuàng)新孵化平臺。 中山研究院是國際機器人聯(lián)合體支撐單位,并與新加坡南洋理工大學等國外機器人領域專家團隊建立了良好的...
信號機房巡檢是鐵路電務的日常運維工作的重要 工作之一,通過巡查及檢視各類生產設備的狀態(tài),可及時 性防范及維修發(fā)生的故障及其隱患.確保生產的穩(wěn)定及安全。 近年來,傳感器技術、人工智能技術以及機器人技 ...
更多
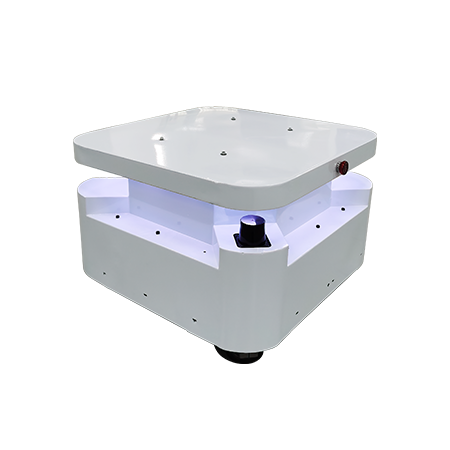
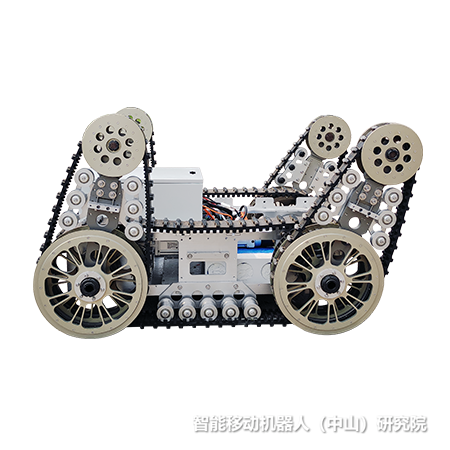
四驅全向巡檢機器人,雙驅輕型巡檢機器人
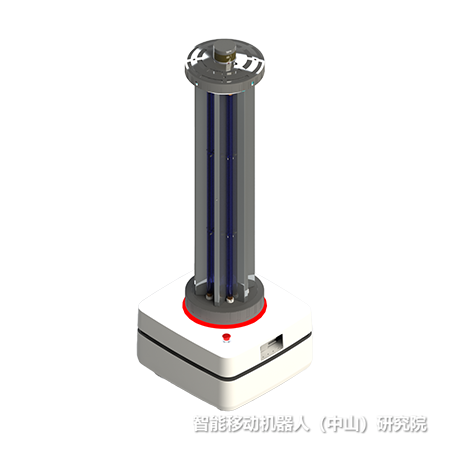
圍界安防無人巡邏車目標實現(xiàn)沿已知規(guī)定路線進行自主安防巡邏,是現(xiàn)有安防系統(tǒng)的有效補充,在大型廠區(qū)、倉庫、機場等場景的安保巡邏領域有巨大應用潛力。本產品是以市場需求為牽引,以提升圍界安防無人巡邏車控制技術...
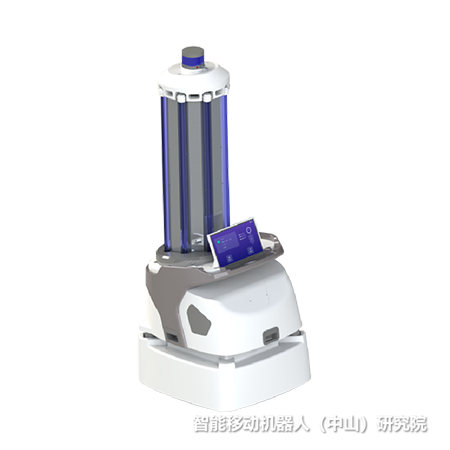
智能移動安防巡檢機器人是一款集物資管理、導引解說及語音查詢等多功能于一體的全自主巡檢機器人。融合激光雷達及高靈活度轉向底盤實現(xiàn)360°自主避障,輕松實現(xiàn)室內環(huán)境下的自主巡檢。機器人搭載煙霧,溫濕度,火...
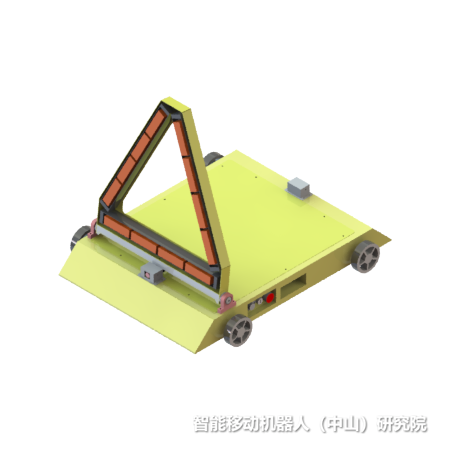
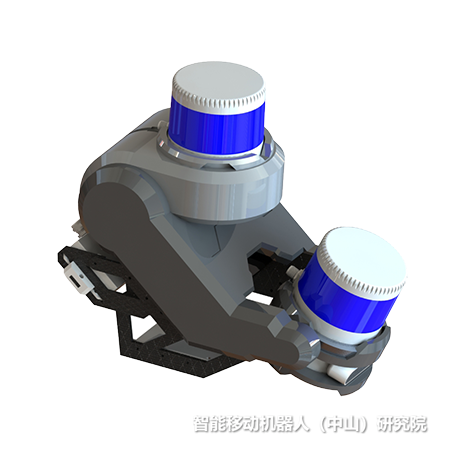
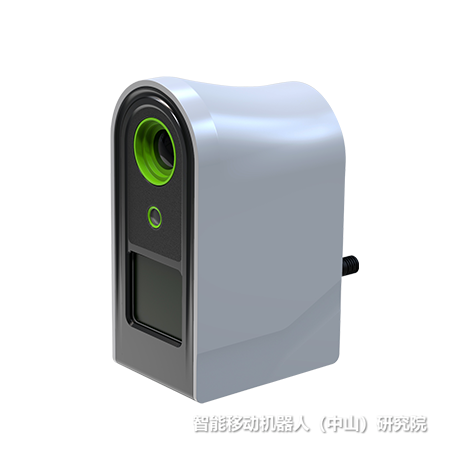
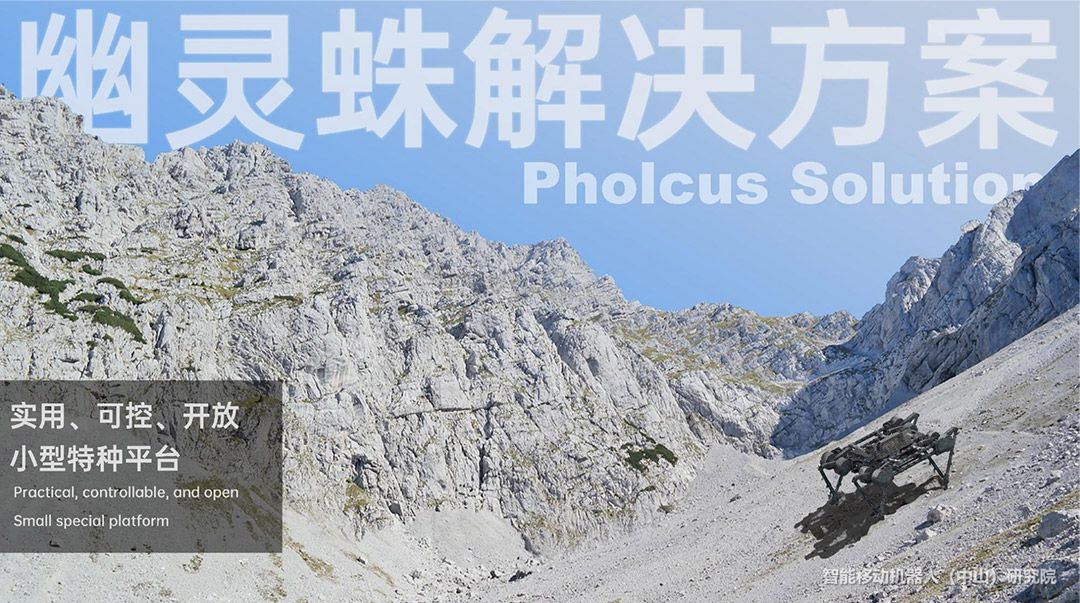
幽靈蛛并聯(lián)四足機器人目標實現(xiàn)室內感知建圖、目標識別定位、地下機動等作業(yè)功能,實現(xiàn)室外自主巡邏、載荷運輸、野外機動等作業(yè)功能。因其高機動性、高通過性、具備一定載荷能力等特點,結合已形成的類似Pixhaw...
幽靈蛛,并聯(lián)四足機器人,
桌面級高性能仿生四足機器人“Dmini”。基于 STM32 單片機芯片的主控制器進行控制,具有良好的擴展性,可供用戶按需添加各種開發(fā)板平臺或傳感器,面向中小學、本科及高職院校學生,開設和教學體系的完善...
四足機器人,足式機器人,四足仿生機器人
50kg機器狗,Panda系列仿生四足機器人,可廣泛適應室內/室外多種結構化/非結構化地形環(huán)境,支持遙控、自主、跟隨等多模式操控,具備靈巧機動、通過性強、互操作性高等特點。
50kg機器狗,四足仿生機器人
2025-04-11
01
2025-04
智能移動機器人中山研究院攻克防爆AG...
12
2025-02
元宵佳節(jié)元宵佳節(jié),2025年第38屆...
09
2024-12
智能無人清掃車是科技與環(huán)保的完美結合...
07
2024-08
地面無人巡邏機器人在科技日新月異的今...